



 Wyjścia różnicowe – dodatek do dokumentacji CSMIO/IP wersja PDF
Wyjścia różnicowe – dodatek do dokumentacji CSMIO/IP wersja PDF
[accordion]
[toggle title=”1.1. Informacje ogólne – Dlaczego wyjścia różnicowe?”]

Urządzenia CSMIO/IP zostały zaprojektowane z myślą o maksymalnej niezawodności i odporności na zakłócenia. W środowisku przemysłowym poziom zakłóceń elektromagnetycznych często jest bardzo wysoki. Sygnały sterujące ruchem osi – STEP/DIR są najbardziej narażone na wpływ zakłóceń ponieważ są to sygnały szybkie, szczególnie w modelu CSMIO/IP-S – do 4MHz.
Profesjonalne sterowniki silników (obojętnie czy serwo, czy krokowych) posiadają wejścia STEP/DIR odpowiednio przygotowane by podłączyć je z w sposób odporny na zakłócenia zewnętrzne. Odbywa się to poprzez tzw. sygnały różnicowe, które mają nieporównanie większą odporność na zakłócenia.
Podłączenie różnicowe wykonuje się skręconą ze sobą parą przewodów, czyli każdy sygnał potrzebuje dwóch przewodów – sygnału dodatniego (+) i ujemnego (-). Nie ma to nic wspólnego z zasilaniem, stąd nie można np. sygnałów (-) łączyć z masą urządzenia, gdyż nastąpi jego uszkodzenie!
Ktoś mógłby jednak powiedzieć, że przecież przed chwilą była też mowa o niezawodności, a tu nagle groźba uszkodzenia urządzenia. Jak często bywa w życiu – coś za coś. Szybkie wyjścia różnicowe praktycznie nie mogą być zabezpieczone tak jak zwykłe, pozostałe sygnały wejścia/wyjścia. Linia różnicowa musi posiadać określone standardami parametry, które uległyby zmianie przy zastosowaniu dodatkowych komponentów zabezpieczających. Gdyby z kolei zastosować zwykłe wyjścia, podłączenie wielu profesjonalnych napędów byłoby praktycznie niemożliwe. Niektóre napędy mają wejścia izolowane optycznie, z tzw. transoptorami – w takim wypadku da się podłączyć zarówno zwykły sygnał jak i różnicowy. Wiele napędów jednak posiada na szybkich wejściach tzw. odbiorniki linii różnicowej i wtedy podłączenie zwykłego sygnału będzie skutkowało gubieniem impulsów i błędami pozycjonowania.
Reasumując, wyjścia różnicowe to najodporniejsza opcja jeśli chodzi o zakłócenia, jest to też rozwiązanie najbardziej uniwersalne, ale trzeba poświęcić trochę uwagi podczas podłączania, gdyż takie wyjścia łatwo uszkodzić jeśli zrobimy to w niewłaściwy sposób.
[/toggle]
[toggle title=”1.2. Użyte oznaczenia”]
![]() Takie podłączenie nie grozi uszkodzeniem i będzie poprawnie działać.
Takie podłączenie nie grozi uszkodzeniem i będzie poprawnie działać.
![]() Takie podłączenie nie spowoduje uszkodzenia, ale nie będzie działać poprawnie.
Takie podłączenie nie spowoduje uszkodzenia, ale nie będzie działać poprawnie.
![]() Takie podłączenie spowoduje uszkodzenie sprzętowe sterownika CSMIO/IP.
Takie podłączenie spowoduje uszkodzenie sprzętowe sterownika CSMIO/IP.
[/toggle]
[toggle title=”2.1. Sterowniki silników z wejściem transoptorowym”]
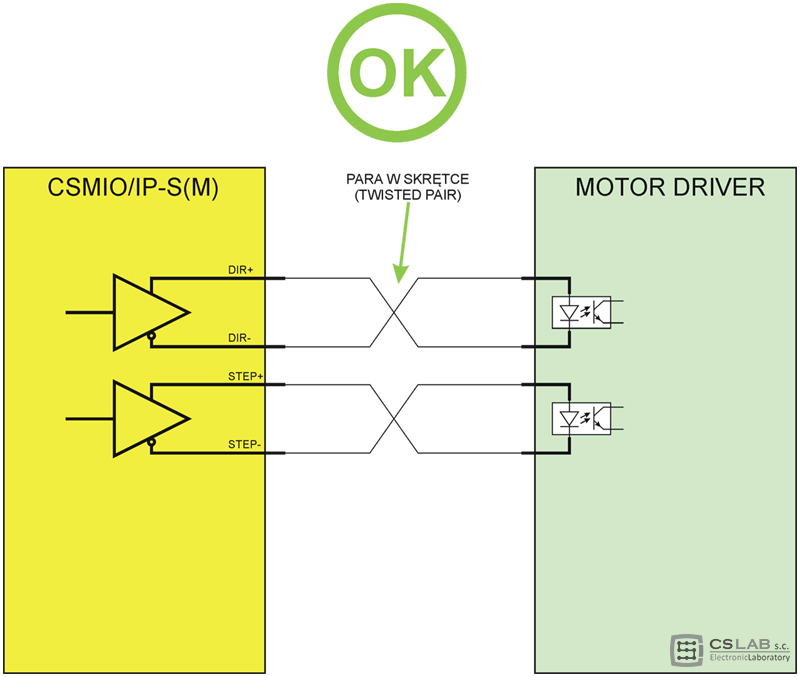
Wejście transoptorowe to najlepsza z możliwych opcji zarówno pod względem odporności na zakłócenia jak i wygody podłączenia. Dla każdego sygnału potrzebna jest para skręconych ze sobą przewodów (tzw. skrętka). Oczywiście przy podłączaniu większej ilości osi można użyć przewodów, które posiadają większą liczbę par – np. przewód sieci komputerowej posiada 4 pary, czyli można nim podłączyć sygnały STEP+/STEP- oraz DIR+/DIR- dla dwóch osi.
Jeśli sterownik silnika ma wejścia transoptorowe nie ma potrzeby dodatkowego łączenia masy urządzeń.
[/toggle]
[toggle title=”2.1.1. Poprawne podłączenie do wejść transoptorowych”]
Oznaczenia na napędzie mogą być różne, należy dokładnie zapoznać się z dokumentacją. Może to być np. PUL+/PUL- oraz SIGN+/SIGN-, nie jest to jednak regułą. Często też napędy serwo mają dwa różne typy wejść STEP/DIR. Jedne zwykłe (nie różnicowe) do pracy z niską częstotliwością, a drugi typ różnicowy do pracy z wysokimi częstotliwościami. Wykorzystujemy wtedy zawsze wejścia różnicowe dla wysokich częstotliwości, nawet jeśli pracujemy na wolniejszym CSMIO/IP-M.
[/toggle]
[toggle title=”2.1.2. Poprawne podłączenie do wejść transoptorowych z przewodem wspólnym”]
Ten wariant jest nieco gorszy z uwagi na mniejszą odporność na zakłócenia i nieco bardziej kłopotliwe podłączanie.

W tym wypadku nie używamy skrętki, z tego powodu połączenie bardziej narażone jest na wpływ zakłóceń. Wspólny przewód (katoda) jest łączona do masy urządzenia, w CSMIO/IP-S jest to pin 13 złącza STEP/DIR, z kolei dla CSMIO/IP-M musimy skorzystać z masy na pinie 2 lub 8 złącza ANALOG I/O, gdyż na złączu STEP/DIR nie ma pinu GND.
![]() Ważne jest by nie łączyć wyprowadzeń STEP- i DIR- z masą (GND) urządzenia, gdyż nastąpi zwarcie i uszkodzenie stopni wyjściowych urządzenia.
Ważne jest by nie łączyć wyprowadzeń STEP- i DIR- z masą (GND) urządzenia, gdyż nastąpi zwarcie i uszkodzenie stopni wyjściowych urządzenia.
[/toggle]
[toggle title=”2.1.3. Przykład nieprawidłowego podłączenia do wejść transoptorowych”]
![]() Na skutek zwarcia pomiędzy sygnałami STEP- oraz DIR- przy takim podłączeniu nastąpi uszkodzenie sterownika CSMIO/IP. Uszkodzenia wynikające z błędnego podłączenia nie są objęte gwarancją!
Na skutek zwarcia pomiędzy sygnałami STEP- oraz DIR- przy takim podłączeniu nastąpi uszkodzenie sterownika CSMIO/IP. Uszkodzenia wynikające z błędnego podłączenia nie są objęte gwarancją!
[/toggle]
[toggle title=”2.2. Sterowniki silników z odbiornikiem linii różnicowej”]
Jest to bardzo częste rozwiązanie z uwagi na to, że odbiorniki linii są tańsze niż szybkie transoptory stąd producenci napędów chętnie je stosują.
Nie mniej niezawodność tego rozwiązania jest na bardzo wysokim poziomie, a różnicą w stosunku do transoptorów jest konieczność dodatkowego połączenia mas (GND) urządzeń oraz bezwzględnego stosowania ekranowania nawet przy krótkich połączeniach.
[/toggle]
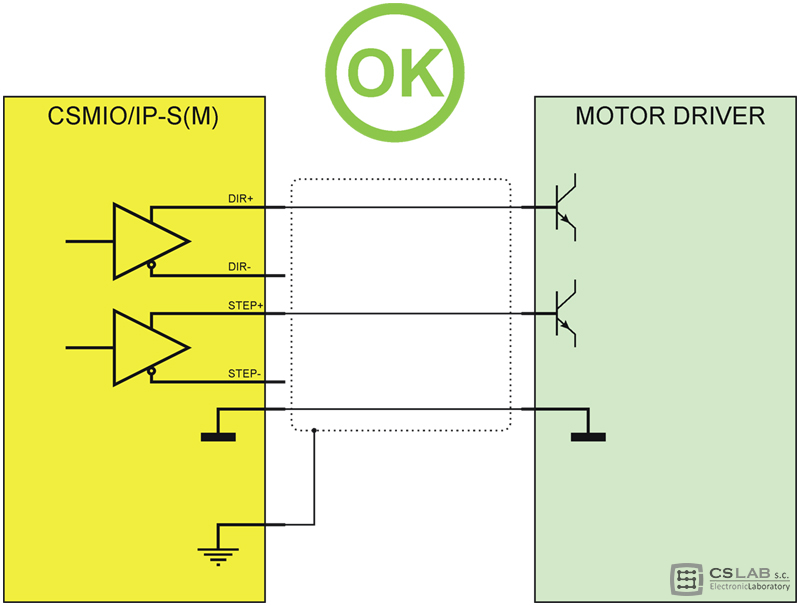
[toggle title=”2.2.1. Przykład poprawnego podłączenia wejścia z odbiornikiem linii różnicowej”]
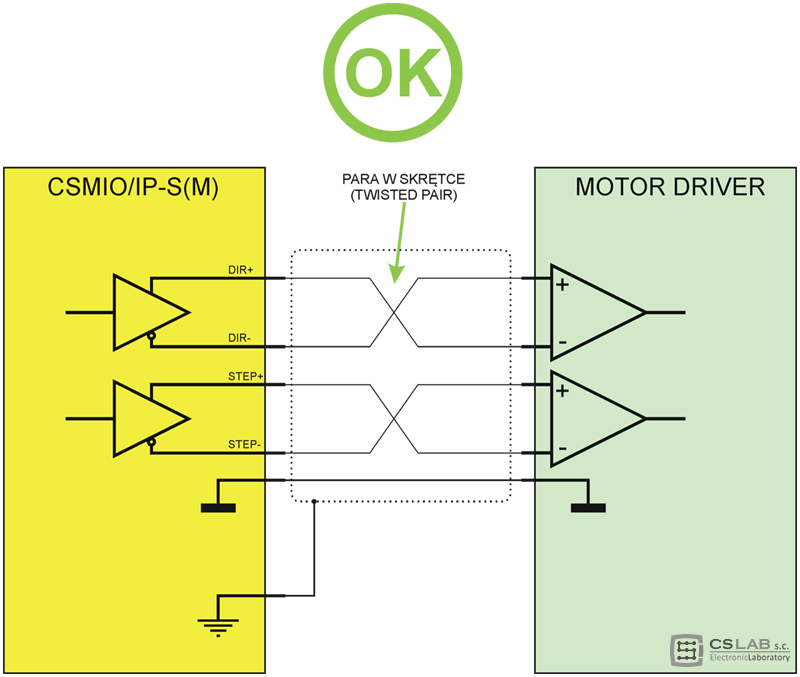
Jak widać na powyższym schemacie podłączenie jest również bardzo łatwe, przykład dotyczy pojedynczego napędu, pozostałe podłączamy analogicznie, pamiętając o podłączeniu masy (GND) do wszystkich napędów.
Ekran dostępny jest na obudowie złącza CSMIO/IP-S(M). Ekranowanie powinno być połączone tylko i wyłącznie od strony sterownika CSMIO/IP.
Masa (GND) dostępna jest w CSMIO/IP-S na pinie 13 złącza STEP/DIR, z kolei dla CSMIO/IP-M musimy skorzystać z masy na pinie 2 lub 8 złącza ANALOG I/O, gdyż na złączu STEP/DIR nie ma pinu GND.
[/toggle]
[toggle title=”2.2.2. Nieprawidłowo – brak połączenia masy (GND) urządzeń”]
![]() Takie podłączenie nie spowoduje uszkodzenia, ale nie będzie działać poprawnie. Co więcej może dawać bardzo dziwne efekty w postaci błędów pozycjonowania, które raz będą się pojawiać by po chwili zniknąć. Masa (GND) urządzeń musi być połączona, nawet jeśli bez tego połączenia wszystko zdaje się działać poprawnie.
Takie podłączenie nie spowoduje uszkodzenia, ale nie będzie działać poprawnie. Co więcej może dawać bardzo dziwne efekty w postaci błędów pozycjonowania, które raz będą się pojawiać by po chwili zniknąć. Masa (GND) urządzeń musi być połączona, nawet jeśli bez tego połączenia wszystko zdaje się działać poprawnie.
[/toggle]
[toggle title=”2.2.3. Nieprawidłowo – połączenie masy z ekranowaniem”]
![]() Tego typu błąd może również ujść uwadze przez dłuższy czas, a nawet w niektórych przypadkach w ogóle nie powodować zauważalnych problemów. Masy (GND) z ekranowaniem nie należy jednak łączyć. Negatywne efekty w takim wypadku mogą ujawniać się tylko od czasu do czasu, co bez znajomości przyczyny ciężko jest zlokalizować.
Tego typu błąd może również ujść uwadze przez dłuższy czas, a nawet w niektórych przypadkach w ogóle nie powodować zauważalnych problemów. Masy (GND) z ekranowaniem nie należy jednak łączyć. Negatywne efekty w takim wypadku mogą ujawniać się tylko od czasu do czasu, co bez znajomości przyczyny ciężko jest zlokalizować.
[/toggle]
[toggle title=”2.2.4. Nieprawidłowo – obustronne podłączenie ekranowania (tzw. pętla)”]
![]() Ten dość częsty błąd popełniany podczas instalacji z reguły (zwłaszcza przy krótkich przewodach) nie powoduje zauważalnych, negatywnych skutków. Takie połączenie jest jednak błędem, który również może ujawniać się tylko w określonych warunkach.
Ten dość częsty błąd popełniany podczas instalacji z reguły (zwłaszcza przy krótkich przewodach) nie powoduje zauważalnych, negatywnych skutków. Takie połączenie jest jednak błędem, który również może ujawniać się tylko w określonych warunkach.
[/toggle]
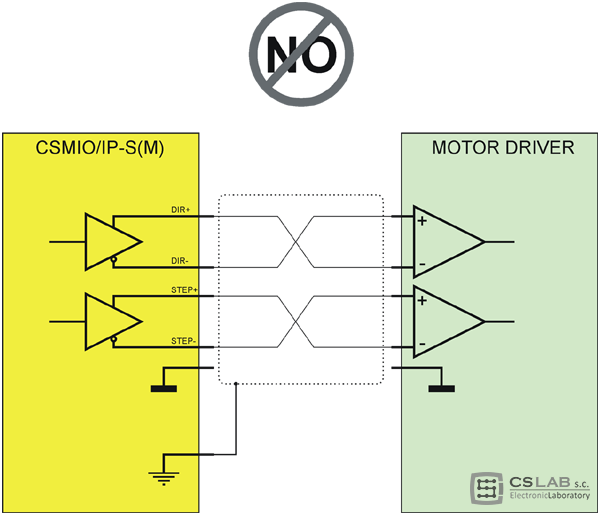
[toggle title=”2.2.5. Nieprawidłowo – połączenie ze sobą sygnałów STEP- i DIR-„]

![]() Takie podłączenie spowoduje uszkodzenie sprzętowe sterownika CSMIO/IP! Uszkodzeń wynikających z niepoprawnej instalacji nie obejmuje gwarancja!
Takie podłączenie spowoduje uszkodzenie sprzętowe sterownika CSMIO/IP! Uszkodzeń wynikających z niepoprawnej instalacji nie obejmuje gwarancja!
Sygnały DIR- oraz STEP- to nie masa (GND) i nie można ich łączyć ze sobą. Spowoduje to zwarcie i uszkodzenie stopnia wyjściowego w urządzeniu CSMIO/IP.
[/toggle]
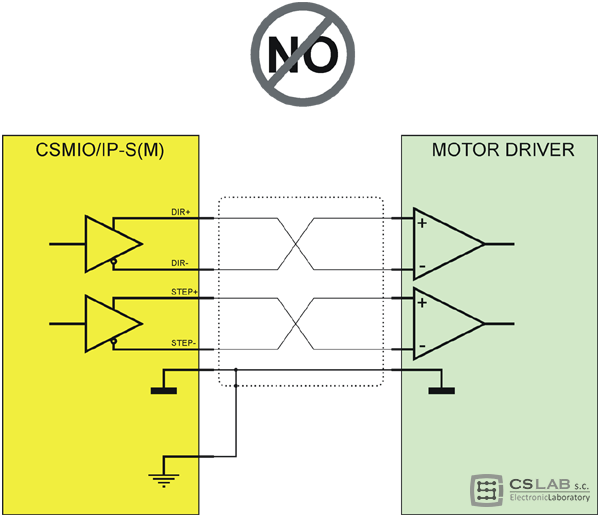
[toggle title=”2.2.6. Nieprawidłowo – połączenie sygnałów STEP- i DIR- do masy (GND)”]
![]() Takie podłączenie spowoduje uszkodzenie sprzętowe sterownika CSMIO/IP! Uszkodzeń wynikających z niepoprawnej instalacji nie obejmuje gwarancja!
Takie podłączenie spowoduje uszkodzenie sprzętowe sterownika CSMIO/IP! Uszkodzeń wynikających z niepoprawnej instalacji nie obejmuje gwarancja!
Sygnały DIR- oraz STEP- to nie masa (GND) i nie można ich łączyć ze sobą ani do masy (GND). Spowoduje to zwarcie i uszkodzenie stopnia wyjściowego w urządzeniu CSMIO/IP.
[/toggle]
[toggle title=”2.3. Podłączenie do wejść tranzystorowych”]
Wejścia typu tranzystorowego są rzadziej spotykane. Nie jest to najlepsze rozwiązanie z uwagi na stosunkowo niską odporność na zakłócenia oraz brak izolacji galwanicznej. Ten typ wejść STEP/DIR przeznaczony jest dla małych częstotliwości, rzędu 250kHz.
![]() Należy zwrócić uwagę na stosowany standard napięcia, ponieważ zdarza się, że tego typu wejścia pracują w standardzie 24V. Wyjścia różnicowe urządzeń CSMIO/IP pracują w standardzie 5V, więc podłączenie w takim wypadku nie będzie możliwe. Należy dokładnie zapoznać się z dokumentacją napędu.
Należy zwrócić uwagę na stosowany standard napięcia, ponieważ zdarza się, że tego typu wejścia pracują w standardzie 24V. Wyjścia różnicowe urządzeń CSMIO/IP pracują w standardzie 5V, więc podłączenie w takim wypadku nie będzie możliwe. Należy dokładnie zapoznać się z dokumentacją napędu.
[/toggle]
[toggle title=”2.3.1. Przykład prawidłowego podłączenia do wejść tranzystorowych”]
Podłączając urządzenia CSMIO/IP do wejść tranzystorowych pamiętać należy o połączeniu masy (GND) oraz o tym, by wyjścia STEP- i DIR- pozostawić niepodłączone. Ważne jest też ekranowanie.
Masa (GND) dostępna jest w CSMIO/IP-S na pinie 13 złącza STEP/DIR, z kolei dla CSMIO/IP-M musimy skorzystać z masy na pinie 2 lub 8 złącza ANALOG I/O, gdyż na złączu STEP/DIR nie ma pinu GND.
[/toggle]
[toggle title=”2.3.2. Nieprawidłowo – Zwarcie sygnałów STEP- i DIR- i podanie ich zamiast masy (GND)”]
![]() Takie podłączenie spowoduje uszkodzenie sprzętowe sterownika CSMIO/IP! Uszkodzeń wynikających z niepoprawnej instalacji nie obejmuje gwarancja!
Takie podłączenie spowoduje uszkodzenie sprzętowe sterownika CSMIO/IP! Uszkodzeń wynikających z niepoprawnej instalacji nie obejmuje gwarancja!
Sygnały DIR- oraz STEP- to nie masa (GND) i nie można ich łączyć ze sobą ani do masy (GND). Spowoduje to zwarcie i uszkodzenie stopnia wyjściowego w urządzeniu CSMIO/IP.
[/toggle]
[toggle title=”2.3.3. Nieprawidłowo – Zwarcie sygnałów STEP- i DIR- do masy (GND)”]

![]() Takie podłączenie spowoduje uszkodzenie sprzętowe sterownika CSMIO/IP! Uszkodzeń wynikających z niepoprawnej instalacji nie obejmuje gwarancja!
Takie podłączenie spowoduje uszkodzenie sprzętowe sterownika CSMIO/IP! Uszkodzeń wynikających z niepoprawnej instalacji nie obejmuje gwarancja!
Sygnały DIR- oraz STEP- to nie masa (GND) i nie można ich łączyć ze sobą ani do masy (GND). Spowoduje to zwarcie i uszkodzenie stopnia wyjściowego w urządzeniu CSMIO/IP.
[/toggle]
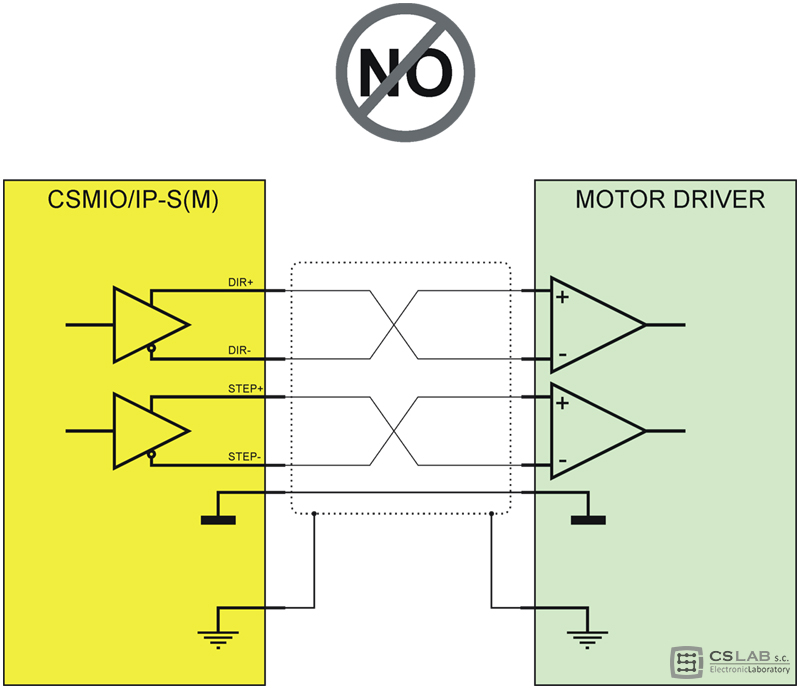
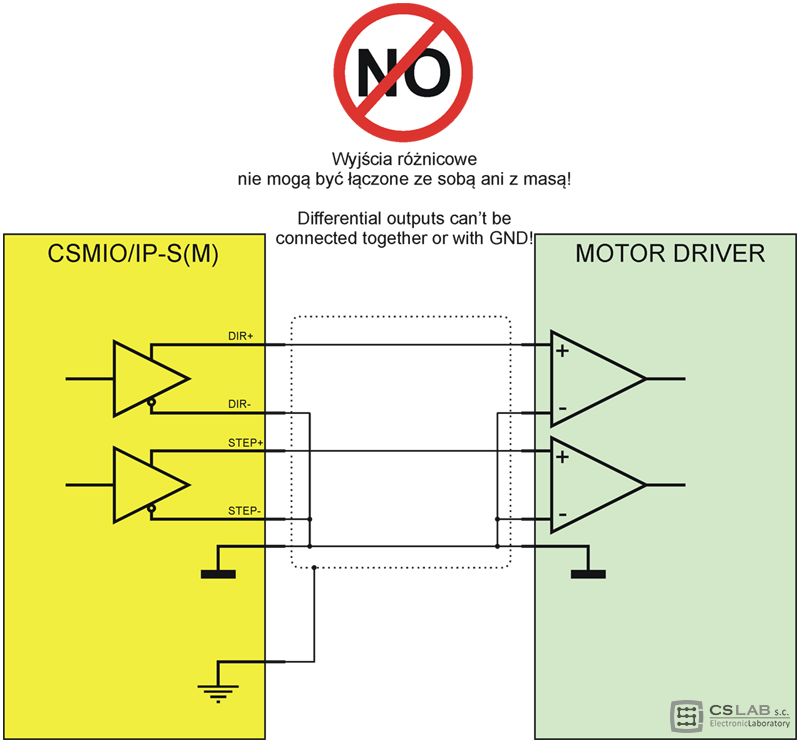
[toggle title=”2.4. Częsty błąd popełniany przy podłączaniu napędów kilku osi”]
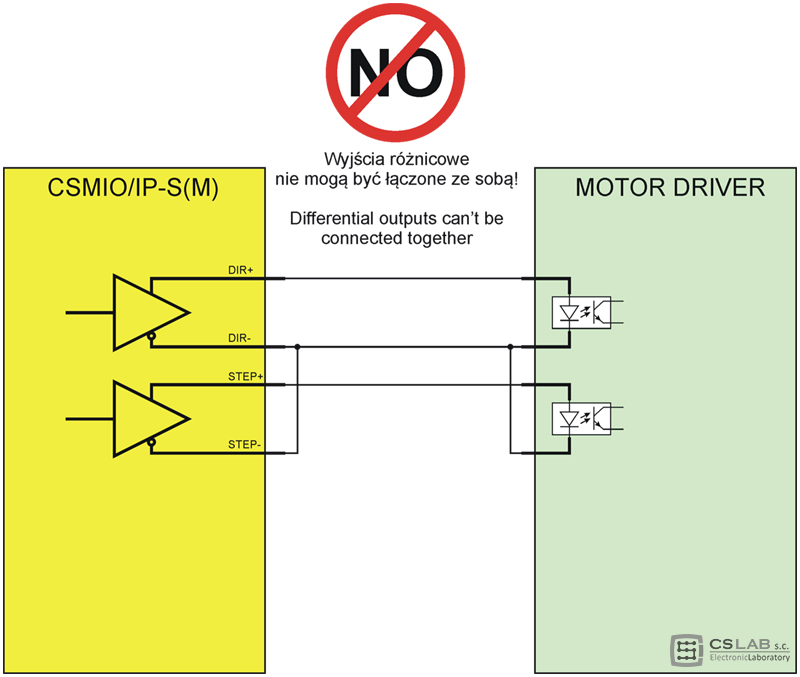
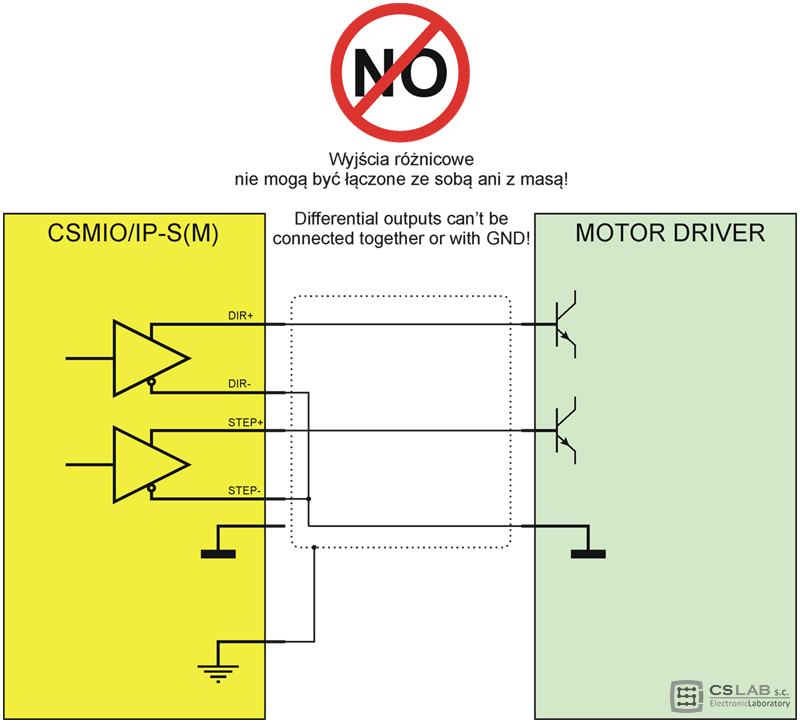
Oznaczenia „-” i „+” przy nazwach sygnałów STEP/DIR nie oznaczają zasilania ani niczego w tym rodzaju. Takich sygnałów pod żadnym pozorem nie można ze sobą łączyć, ponieważ spowoduje to uszkodzenie stopni wyjściowych sterownika CSMIO/IP.
Na poniższym schemacie zaprezentowano niepoprawne połączenia powodujące awarię każdego urządzenia z różnicowym nadajnikiem linii, jakim jest również CSMIO/IP-S i M.
O ile użytkownicy stosunkowo rzadko łączą sygnały dodatnie, o tyle często zdarza się łączenie sygnałów ujemnych, myląc je z masą (GND) urządzenia.

[/toggle]
[toggle title=”3. Podsumowanie – kilka słów od autora”]
Wykonując instalację kompletnego systemu sterowania obrabiarki CNC często łączymy ze sobą komponenty o znacznej wartości. Dlatego warto poświęcić nieco czasu na dokładne zapoznanie się z dokumentacją zastosowanych urządzeń. Osobiście wykonując wiele instalacji i uruchomień u klientów popełniłem nie jeden kosztowny błąd. By wykluczyć tego typu sytuacje należy unikać pośpiechu i wszystkie prace wykonywać jak najstaranniej.
Należy pamiętać, że żadne urządzenie elektroniczne nie jest w pełni odporne na niepoprawną instalację. Niektóre błędy spowodują jedynie, że system nie będzie funkcjonował poprawnie, niektóre niestety spowodują uszkodzenie jednego bądź nawet więcej komponentów składowych. W tego typu systemach ważne są szczegóły, do niedawna np. sam uważałem, że takie rzeczy jak sposób podłączenia ekranowania czy uziemienia nie ma krytycznego wpływu na pracę sterowania maszyny CNC.
Praktyka pokazała jednak co innego i jeśli system sterowania ma pracować idealnie i niezawodnie – ważny jest każdy szczegół. Szczególnie osoby z mniejszym doświadczeniem powinny poświęcić więcej czasu na dokładne zapoznanie się z dokumentacją wszystkich urządzeń, które stosują. Internet również jest nieocenionym źródłem cennych informacji, aczkolwiek trzeba uważać z jakich źródeł się korzysta, bowiem szczególnie na forach internetowych sporo jest niefachowych porad.
[/toggle]
[/accordion]
