




")
")
")
Sterownik CNC – 4 osie CSMIO/IP-M Ethernet
CSMIO/IP-M to 4-osiowy sterownik ruchu, który w połączeniu z komputerem  PC i zainstalowanym na nim oprogramowaniem sterującym simCNC jest idealnym systemem do kontroli maszyn CNC. Kontroler CSMIO/IP-M został stworzony z myślą o profesjonalnych odbiorcach, producentach maszyn ale także hobbistach, którzy chcą wyposażyć swoją obrabiarkę w wydajny, stabilny i elastyczny system sterowania CNC. Kontroler CSMIO/IP-M jest dedykowany osobom, które za niewielkie pieniądze chcą kupić kontroler o identycznej precyzji i stabilności pracy, co jego większy brat CSMIO/IP-S (więcej o dostępnych funkcjonalnościach sterownika CSMIO/IP-M przeczytasz niżej).
PC i zainstalowanym na nim oprogramowaniem sterującym simCNC jest idealnym systemem do kontroli maszyn CNC. Kontroler CSMIO/IP-M został stworzony z myślą o profesjonalnych odbiorcach, producentach maszyn ale także hobbistach, którzy chcą wyposażyć swoją obrabiarkę w wydajny, stabilny i elastyczny system sterowania CNC. Kontroler CSMIO/IP-M jest dedykowany osobom, które za niewielkie pieniądze chcą kupić kontroler o identycznej precyzji i stabilności pracy, co jego większy brat CSMIO/IP-S (więcej o dostępnych funkcjonalnościach sterownika CSMIO/IP-M przeczytasz niżej).
Jak to działa?
W dużym uproszczeniu – mózgiem całego systemu jest oprogramowanie (simCNC, Mach3, Mach4) zainstalowane na komputerze PC, z kolei sercem całego systemu jest 4-osiowy sterownik CNC CSMIO/IP-M. Oprogramowanie sterujące simCNC zamienia gcody na trajektorię ruchu i wysyła ją za pomocą połączenia sieciowego do kontrolera ruchu CSMIO/IP-M. Na podstawie trajektorii ruchu sterownik generuje precyzyjny sygnał step/dir dla wszystkich osi. Taki podział zadań powoduje mniejsze obciążenie komputera PC w porównaniu do rozwiązań wykorzystujących klasyczny port równoległy LPT.
Stabilność działania zapewniona jest dzięki połączeniu z komputerem PC poprzez sieć ETHERNET, której warstwa fizyczna jest galwanicznie izolowana, a stosowane protokoły zapewniają poprawną i szybką transmisję nawet w trudnym środowisku przemysłowym. Praktycznie żadne inne interfejsy komunikacyjne nie zapewniają ciągłości transmisji i niezawodności na tak wysokim poziomie jak ETHERNET. Z tego też właśnie powodu jest to obecnie światowy standard szybkiej komunikacji cyfrowej.
Prosta instalacja – sterownik CNC 4-osiowy CSMIO/IP-M do prawidłowego działania nie wymaga żadnej zewnętrznej elektroniki. Sygnały wejścia/wyjścia są wewnętrznie izolowane optycznie, filtrowane, zabezpieczone przed zwarciem, przegrzaniem etc. Wszystkie sygnały dostosowane są do standardu przemysłowego 24V. Całość zamknięta jest w kompaktowej obudowie, montowanej na szynie DIN, co jeszcze bardziej upraszcza instalację i skraca czas montażu mechanicznego i elektrycznego w szafie sterowniczej.
Jako interfejs sterowania napędami wybór padł na popularny standard „krok/kierunek (step/dir)”. Umożliwia to sterowanie zarówno napędami silników krokowych, jak i większości nowoczesnych serwo napędów. Częstotliwość sygnału step osiągająca do 125KHz pozwala zastosować wystarczający podział krokowy w silnikach krokowych zmniejszając przy tym rezonans i znacznie polepszając osiągi układu napędowego. Pozwala też w pełni wykorzystać enkodery o przeciętnej liczbie impulsów na obrót (10 tys. imp/rev) a także enkodery o dużej liczbie impulsów na obrót z zastosowaniem niewielkiej przekładni elektronicznej.
Główne zalety kontrolera CSMIO/IP-M
- Sygnał step/dir – pierwszą zauważą zaletą, zaraz po pierwszym uruchomieniu maszyny CNC wyposażonej w kontroler CSMIO/IP-M, jest płynna i precyzyjna praca silników. Odpowiada za to wysokiej jakości sygnał step/dir i bufor danych, który magazynuje małą część trajektorii przesyłanej przez oprogramowanie sterujące simCNC.
- Bufor danych – wspomniany bufor trajektorii zapewnia nieprzerwaną pracę maszyny CNC nawet w przypadkach chwilowych problemów z połączeniem sieciowym lub z oprogramowaniem sterującym.
- Obsługa osi zależnych – obsługa 1 osi zależnej (brak możliwością korekcji geometrii maszyny).
- System bezpieczeństwa – bardzo istotną zaletą kontrolera CSMIO/IP-M jest własny system bezpieczeństwa. Czuwa on nieprzerwanie nad bezpieczeństwem użytkownika i maszyny. W jego skład wchodzi wiele samodzielnych algorytmów i “watchdogów” bardzo szybko reagujących w sytuacjach niedozwolonych lub alarmowych.Obsługa RESET dla napędów osi. Obsługa sygnałów FAULT z serwo napędów (natychmiastowe zatrzymanie maszyny w przypadku awarii którejkolwiek osi).
- Solidna aluminiowa obudowa, dobrze odprowadzająca ciepło, oraz doskonale chroniąca obwody elektroniczne urządzenia.Czytelne kontrolki na przednim panelu, ułatwiające prace instalacyjne i ewentualną diagnostykę w przypadku problemów z działaniem krańcówek lub innych urządzeń zewnętrznych, z którymi współpracuję CSMIO/IP-M. Ta kompaktowa obudowa montowana jest na szynie DIN, co jeszcze bardziej upraszcza instalację i skraca czas montażu mechanicznego i elektrycznego w szafie sterowniczej.
- Makra -Możliwość sterowania wszystkimi sygnałami cyfrowymi i analogowymi poprzez makra Python.
- Standard przemysłowy – kontroler CSMIO/IP-M został przystosowany do powszechnie panujących standardów stosowanych przez producentów serwo napędów, jaki i napędów krokowych, m.in.:
- wyjścia step/dir obsługiwane przez nadajniki linii różnicowej DS26C31 (zgodny ze standardem RS422),
- Optoizolwane wyjścia cyfrowe 24V DC obsługiwane przez wyspecjalizowane układy z zabezpieczeniem przeciw zwarciowym i przeciążeniowym
- Optoizolwane wejścia cyfrowe 24V DC
- Wejścia analogowe 0-10V służące między innymi do podłączenia potencjometrów korekcji prędkości obrotowej wrzeciona i posuwu osi
- Wyjścia analogowe 0-10V służące między innymi do sterowania VFD
Moduły rozszerzeń
Możliwości systemu można rozszerzać poprzez zastosowanie dodatkowego modułu CSMIO-MPG. Moduł ten umożliwia korzystanie z ręcznego manipulatora – bardzo płynne sterowanie ruchem maszyny, automatyczne przełączanie pomiędzy trybem prędkościowym i pozycyjnym.
Uwaga:
Moduły CSMIO-ENC oraz CSMIO-IO nie są obsługiwane przez sterownik CSMIO/IP-M.
Obudowa kontrolera CSMIO/IP-M jak i wszystkich modułów dodatkowych jest przystosowana do montażu na szynie DIN 35mm.
Zestawienie porównawcze
|
PARAMETR |
CSMIO/IP-S |
CSMIO/IP-A |
CSMIO/IP-M |
| Number of axes | 6 |
6 |
4 |
| Digital inputs (optoizolowane) |
32 |
24 |
12 |
| Digital outputs (optoizolowane) |
16 |
16 |
4 |
| Relay outputs |
– |
– |
2 |
| Analog inputs |
4 |
4 |
2 |
| Analog outputs |
2 |
6 (+/- 10V) |
2 |
| Supply voltage |
24VDC +/-10% |
24VDC +/-10% |
24VDC +/-10% |
| Power consumption |
5W |
5W |
5W |
|
Maximum voltage on in/out lines |
30VDC |
30VDC |
30VDC |
| Maximum load of output line |
250mA |
250mA |
250mA |
| Voltage range of analog inputs |
0-10VDC |
0-10VDC |
0-10VDC |
| Maximum load of analog output |
5mA |
5mA |
5mA |
| Axis drives control type |
Step/Direction |
Analog |
Step/Direction |
| Maximum frequency of STEP signal (Mach3/simCNC, Mach4) |
4MHz/8MHz |
– |
125kHz |
| STEP signal duty cycle |
50% |
– |
50% |
| PC connection type |
Ethernet 10/100Mb |
Ethernet 10/100Mb |
Ethernet 10/100Mb |
| Ambient temperature range |
0oC to +60oC |
0oC to +60oC |
0oC to +60oC |
|
Relative humidity (without condensation) |
10% – 95% |
10% – 95% |
10% – 95% |
| CSMIO-MPG module support | |||
| CSMIO-IO module support | |||
| CSMIO-ENC module support | |||
| Backlash compensation | |||
| Homing on INDEX | |||
| Slave axes support | |||
| THC analog mode | |||
| Spindle axis | wkrótce dostępne w simCNC | wkrótce dostępne w simCNC | |
| #G32# threading | wkrótce dostępne w simCNC | wkrótce dostępne w simCNC | |
| RIGID TAPPING | wkrótce dostępne w simCNC | wkrótce dostępne w simCNC | |
| Spindle speed readout | |||
| Feedback |
Zastosowanie
Kontroler CSMIO/IP-M jest dedykowany osobom, które za niewielkie pieniądze chcą kupić kontroler o identycznej precyzji i stabilności pracy, co jego większy brat CSMIO/IP-S. Jednakże osoby te już na etapie projektowania maszyny muszą uwzględniać możliwości (funkcjonalności) kontrolera CSMIO/IP-M.
Kontroler CSMIO/P-M jest polecany użytkownikom / firmom które:
- modernizują oryginalne maszyny CNC, wymagające niewielkiej liczby sygnałów cyfrowych do obsługi podstawowych sygnałów takich jak: krańcówki, E-Stop, Servo Alram, Servo On, Servo Reset, czy też sygnały potrzebne do sterowania wrzeciona (VFD).
- budują nowe frezarki lub rutery o dowolnej wielkości, uzyskujące zadawalające prędkości i precyzję. Przykładowo, sterownik frezarki CNC CSMIO/IP-M pozwala osiągnąć rozdzielczość osi na poziomie 0.002mm, i maksymalną prędkości osi wynoszącą aż 15m/min. Dla większości użytkowników są to parametry przewyższające ich oczekiwania od kontrolera, którego koszt jest niewielki.
-
budują przecinarki plazmowe lub laserowe. Na tym polu kontroler CSMIO/IP-M odnosi niepodważalny sukces. Jest to spowodowane niewygórowaną ceną i możliwościami w pełni wystarczającymi do obsługi tej grupy maszyn.
System sterowania oparty o kontroler CSMIO/IP-M można rozbudować o dodatkowy moduł CSMIO-MPG.
Sterowniki CSMIO/IP-M mogą być z powodzeniem stosowane we frezarkach i tokarkach, które nie wymagają funkcji gwintowania, ruterach, przecinarkach plazmowych, czy laserowych.
W zestawie CSMIO/IP-M otrzymają Państwo:
- Sterownik CNC CSMIO/IP-M
- licencja do programu simCNC (dostarczana drogą elektroniczną)
- Przewód połączeniowy Ethernet
- Wtyczkę zasilania „Phoenix” 3 pin (1 szt.)
- Przejściówkę 1xDB25 -> Terminal block
- Przejściówkę 1xDB25 + 1xDB9 -> Terminal Block
- Taśmę połączeniowa DB25 (2 szt.)
- Taśmę połączeniowa DB9 (1 szt.)
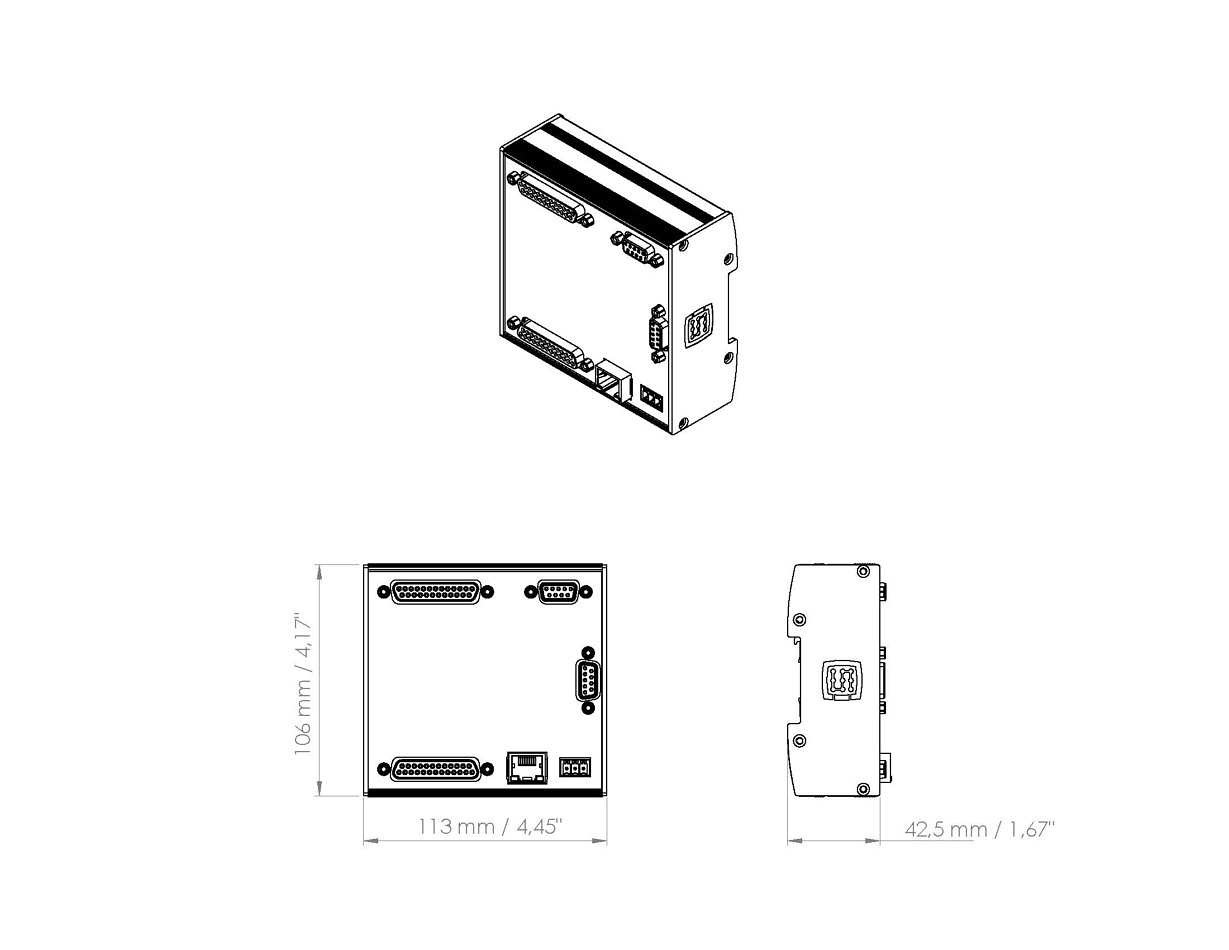
Wymiary CSMIO/IP-M
Oprogramowanie sterujące CNC „simCNC

simCNC to nowatorskie oprogramowanie sterujące CS-Lab dedykowane dla kontrolerów CSMIO/IP
Nasza pasja i lata ciężkiej pracy zaowocowały stworzeniem oprogramowania, które zapewnia użytkownikom najwyższą jakość ruchu, do tej pory niespotykaną w tym segmencie cenowym.
simCNC to program CS-Lab, który używa popularnego, standardowego języka opisu trajektorii ISO G-Code, jednak podczas wczytywania jak i pracy analizuje każdy segment, łuk czy narożnik i praktycznie tworzy wszystkie kształty na nowo, używając zaawansowanych matematycznych algorytmów. Uwzględnianych jest wiele zmiennych, takich jak np. zadana tolerancja, prędkości, przyspieszenia i rodzaj krzywizn, by wygenerować dane dla sterownika i napędów osi w taki sposób, aby ruch był dokładny, płynny i szybki.
W wielu konkurencyjnych programach ruch generowany jest w taki sposób, że prędkość i pozycja maszyny zmieniają się płynnie, natomiast przyspieszenie skokowo. To tak zwany trapezowy profil prędkości. Na niskich wartościach przyspieszeń, rzędu 100-1000mm/s2 nie jest to bardzo mocno zauważalne, ale powoduje między innymi gorszą jakość obrabianej powierzchni i szybsze zużywanie się elementów mechanicznych, które skoki przyspieszenia odbierają jak uderzenia. Z kolei wysokie przyspieszenia (>1000mm/s2) są przy trapezowym profilu prędkości praktycznie nieużywalne.
simCNC przenosi jakość na nieporównanie wyższy poziom, gdyż w obliczeniach uwzględnia to, by przyspieszenie zmieniało się stopniowo. Potocznie nazywa się to profilem „S” prędkości. W praktyce trwa to często ułamki sekund, ale sprawia ogromną różnicę, którą odczuje się na każdej obrabiarce – lekkiej, ciężkiej, amatorskiej czy profesjonalnej. Zarówno na silnikach krokowych jak i serwo. W połączeniu ze wspomnianymi zaawansowanymi algorytmami analizy i matematycznej optymalizacji pozwala to na uzyskanie doskonałej jakości powierzchni, skrócenie czasu obróbki i znaczne zmniejszenie zużycia mechaniki obrabiarki.
Do tego wszystkiego potrzeba jeszcze zaawansowanej elektroniki, która jest w stanie przetworzyć w czasie rzeczywistym strumień danych o ruchu i bez zniekształceń przekazać je do napędów osi. Dlatego powstała seria sterowników CSMIO/IP, które do komunikacji z komputerem wykorzystują połączenie sieciowe Ethernet i są oparte na szybkich mikroprocesorach, a część z nich dodatkowo wykorzystuje autorskie rozwiązania sprzętowe w specjalizowanych czipach FPGA. Kontrolując zarówno oprogramowanie jak i sprzęt jesteśmy w stanie dostarczyć kompletny system, którego składowe części pasują do siebie idealnie, a konfiguracja ograniczona jest do minimum.
Oprogramowanie simCNC zostało stworzone w oparciu o najnowocześniejsze rozwiązania, dzięki temu działa na wszystkich najważniejszych platformach systemowych: Windows, Linux oraz macOS. Interfejs programu jest szybki i responsywny, tak by był gotowy zawsze i na każde skinienie – jak przystało na narzędzie, którego używa się z przyjemnością.
Oprogramowanie simCNC zapewnia niespotykaną dotychczas dynamikę i precyzję ruchu wśród oprogramowań autorskich. Osiągnięto to dzięki zastosowaniu profilu krzywej S a także wyrafinowanych algorytmów optymalizacji trajektorii ruchu. Oznacza to, że maszyna jednocześnie może być:
- szybka,
- dynamiczna,
- precyzyjna,
- a proces obróbki płynny i jednostajny.
Wpływa to ogromnie na skrócenie czasu obróbki, wydłużenie żywotności narzędzi i mechaniki samej maszyny. Program simCNC jest wyposażony w język skryptowy Python.
Download
simCNC software – pobierz program, dokumentację, sprawdź Changelog.
Firmware sterowników CSMIO/IP jest sukcesywnie rozwijany. Wszystkie sterowniki CS-LAB posiadają zainstalowany program ładujący (tzw. bootloader) dzięki czemu nie ma ryzyka uszkodzenia sprzętu przy nieudanej aktualizacji oprogramowania. Aktualizacja odbywa się przy pomocy intuicyjnego kreatora aktualizacji, nie wymaga znajomości samego sprzętu. Oprogramowanie SimCNC nie wymaga instalowania żadnych dodatkowych wtyczek do współpracy z CSMIO/IP.




