



Schemat połączenia sterownika CSMIO/IP-A z napędami TRIO DX33 (dokumentacja) i różnymi oprogramowaniami CNC.

Sortuj schematy i artykuły wg sterownika:
Schemat połączenia sterownika CSMIO/IP-A z napędami TRIO DX33 (dokumentacja) i różnymi oprogramowaniami CNC.
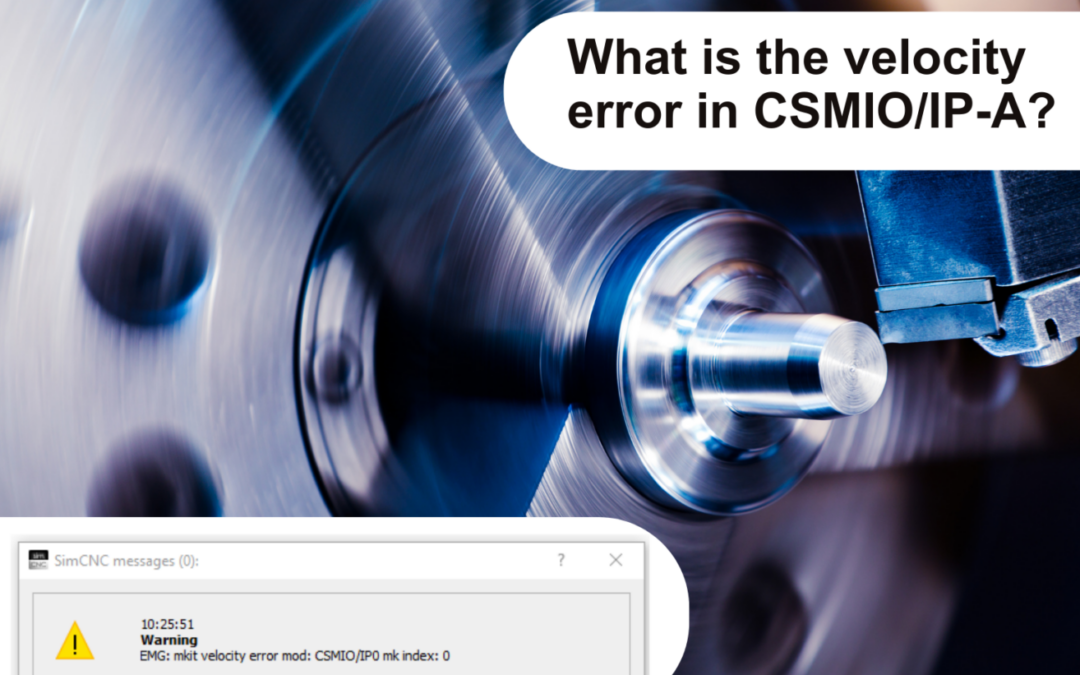
Co oznacza błąd prędkości w CSMIO/IP-A? Komunikat ten oznacza, że powstała zbyt duża różnica prędkości pomiędzy...
Jak zablokować funkcję THC Funkcję THC blokuje się poprzez ustawienie parametru "Anti-dive vel. (%)" na wartość 100. W...

Czym zatem jest błąd „PID fault” (e-PID) i, z jakiego powodu powstaje? Jeden z naszych klientów otrzymał błąd „PID...
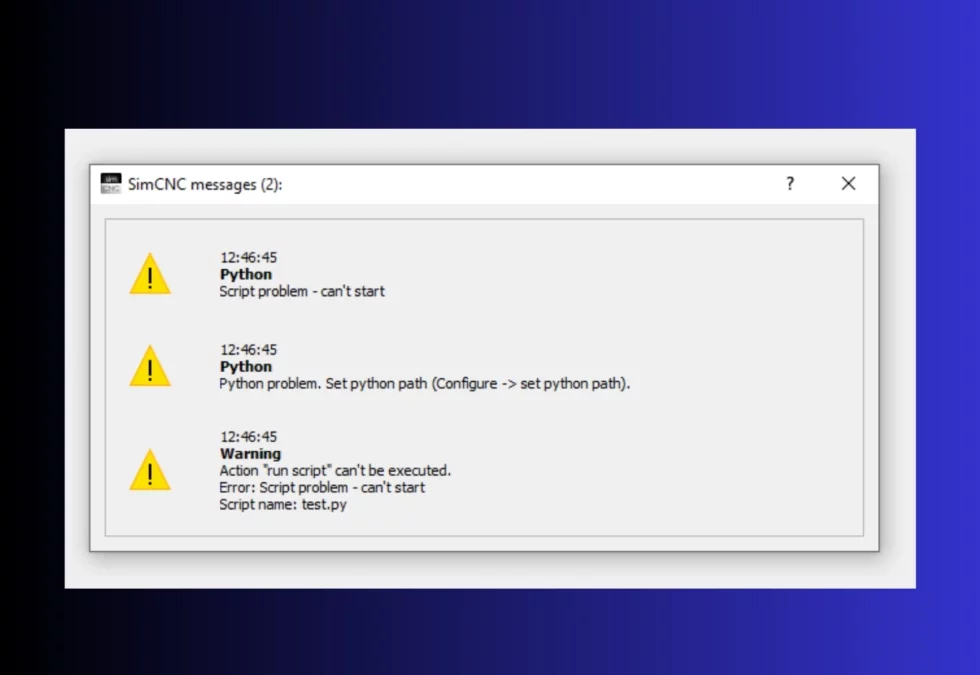
Kiedy pojawia nam się błąd Python, zasadniczym pytaniem jest, co go spowodowało. Powyższy błąd pojawia się,...
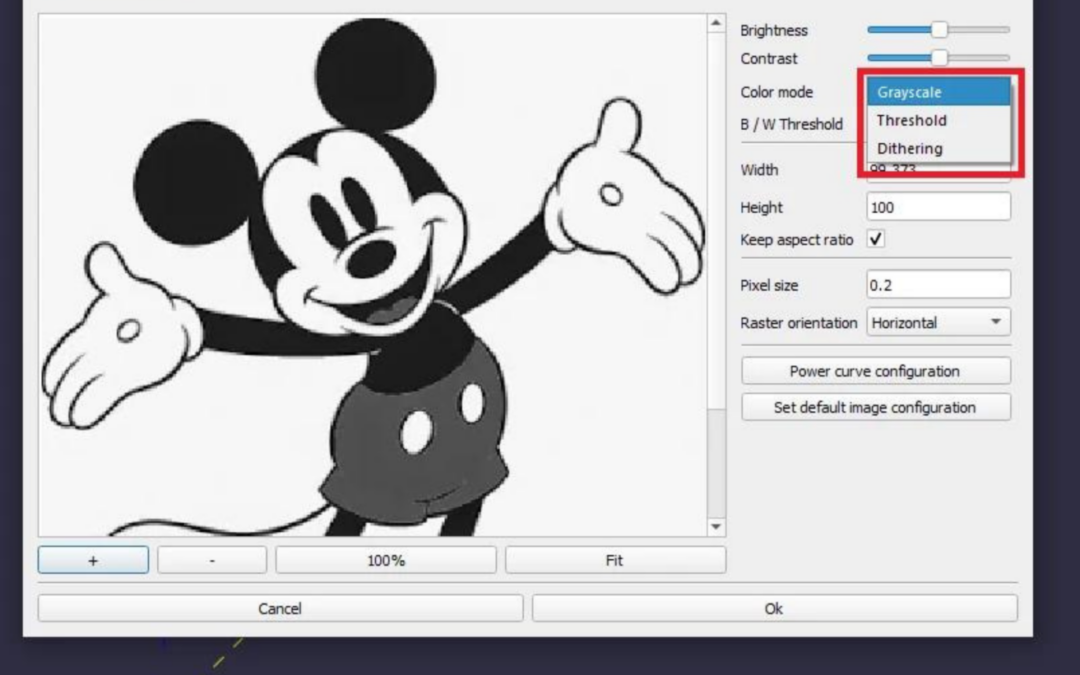
SimCNC wspiera laser na trzy sposoby (wyjścia synchroniczne): 1. Grawerowanie za pomocą wbudowanego w simCNC...

W artykule znajdziecie schematy połączeń sterownika CSMIO/IP-M, Hitachi WJ200 (Omron MX2) i oprogramowania (simCNC, Mach3/Mach4.

Jeśli podejrzewasz, że masz problemy z zakłóceniami, to w pierwszej kolejności należy stwierdzić, na jaki element oddziałują zakłócenie i, jak drogą do niego docierają.
Już jest! Nowa funkcjonalność programu simCNC to potężny i elastyczny edytor GUI.

Oprogramowanie simCNC zawitało właśnie na nową, bardzo popularną platformę – RaspberryPi 4!

Serwonapędy znajdują zastosowanie w automatyce przemysłowej, a także liniach produkcyjnych i maszynach. Najczęściej...

Maszyny CNC są obecnie niezwykle cenione za możliwość szybkiej, precyzyjnej i powtarzalnej pracy. Dzięki nim obróbka...
Click one of our contacts below to chat on WhatsApp

