")
")
")

MPG – Manual Pulse Generator – JOG ręczny manipulator CNC
Ręczny manipulator 6-osiowy to narzędzie do szybkiej konfiguracji bazy materiałowej (G54, G55 …) oraz magazynu narzędzi (offset długości narzędzia). Manipulatory CNC także przeznaczone są do konfiguracji ręcznej obróbki, czy też szybkich ręcznych przejazdów (wymaga modułu CSMIO-MPG dostępnego oddzielnie lub w zestawie z manipulatorem).
Podłączenie z CSMIO-MPG jest wyjątkowo proste i nawet osobom niedoświadczonym powinno zająć nie więcej niż 5 minut. Uruchomienie polega na:
- Zapięciu modułu na szynie DIN
- Umieszczeniu wtyczki DB25 ręcznego manipulatora w gnieździe modułu CSMIO-MPG.
- Podłączeniu szyny CAN za pomocą dołączanej do zestawu taśmy DB9
- Podłączeniu zasilania 24V DC.
- Podłączeniu obwodu E-STOP do zacisków E1 i E2 (kolejność podłączenia nieistotna). Zaciski E1 i E2 są wyprowadzeniami przycisku E-STOP ręcznego manipulatora.
Oznaczenia użyte dla tego urządzenia:
| ISMM2188 | – | 001 | 100 | B | – | 5 | L |
| Series | Sequence Number |
Number of Pulses |
Output Signals |
Supply Voltage |
Output Circuit |
Dodatkowy niebieski przycisk to przycisk pozwalający realizować dodatkowe funkcje, w przypadku simCNC między innymi takie jak :
- kasowanie koordynatu wybranej osi w połączeniu z wielopozycyjnym przełącznikiem wyboru osi,
- wyzwalanie bazowania wybranej osi w połączeniu z wielopozycyjnym przełącznikiem wyboru osi,
- zmiana dowolnej wartości (np. SRO, FRO, JRO) w połączeniu z kołem enkodera,
- i wiele innych, jakie tylko zdołamy wymyśleć.
Jak to działa?
Niebieski przycisk został podłączony do niewykorzystanego dotychczas wejścia cyfrowego numer 9 modułu CSMIO-MPG. Jego naciśnięcie aktywuje wejście numer 9, które uruchomia akcję Python, co powoduje wywołanie makra przypisanego do tej akcji. W tym makrze możemy odczytać pozycje przełączników wyboru osi i wielkości kroku, a także pozycję i prędkość enkodera. Na podstawie tych danych możemy stworzyć dodatkowe funkcjonalności.
W przypadku Mach4 sytuacja wygląda analogicznie, lecz tu należy się posłużyć makrem PLC.
Wykorzystanie dodatkowego przycisku w Mach3 jest niemożliwe.
Specyfikacja techniczna
| Electrical Specification | ||||
| Output circuit | Open collector | Voltage output | Push pull output | Line driver output |
| Power Vcc | 5~30 | 5~30 | 5±0.25 5~30 | 5±0.2512V |
| Current | ≤100mA | ≤100mA | ≤100mA | ≤120mA |
| Load current | 40mA | 40mA | 40mA | 60mA |
| High-level output | Min Vcc*70% | Min Vcc-2.5V | Min Vcc-1.5V | Min 3.4V |
| Low-level output | Max 0.4V | Max 0.4V | Max 0.8V | Max 0.4V |
| Rise Time Tr | Max 1us | Max 1us | Max 1us | Max 20ns |
| Fall Time Tr | Max 1us | Max 1us | Max 1us | Max 20ns |
| Max Responding Frequency | 20kHz | 20kHz | 20kHz | 20kHz |
| Mechanical Specification | ||||
| Max speed(r/min) | Working Temperature | Storage Temperature | Protection Grade | Weight |
| 600 | -25~70℃ | -30~85℃ | IP50 | 750g |
Rozmieszczenie terminali
| ELECTRICAL SPECIFICATION OF SELECTION SWITCH | ||||
| Switch load | 0.4VA | Max. voltage | 25V | |
| Circuit width | 0.1-50mA | |||
| ELECTRICAL SPECIFICATION OF CONTROL SELECTION | ||||
| Connection Point | AC Max. load | AC220VV 0.5A | ||
| DC Max. load | DC24V1A | |||
| ELECTRICAL SPECIFICATION OF STOP SWITCH | ||||
| Connection Point | AC Max. load | AC220V0.5A | ||
| DC Max. load | DC30V1A | |||
![]()
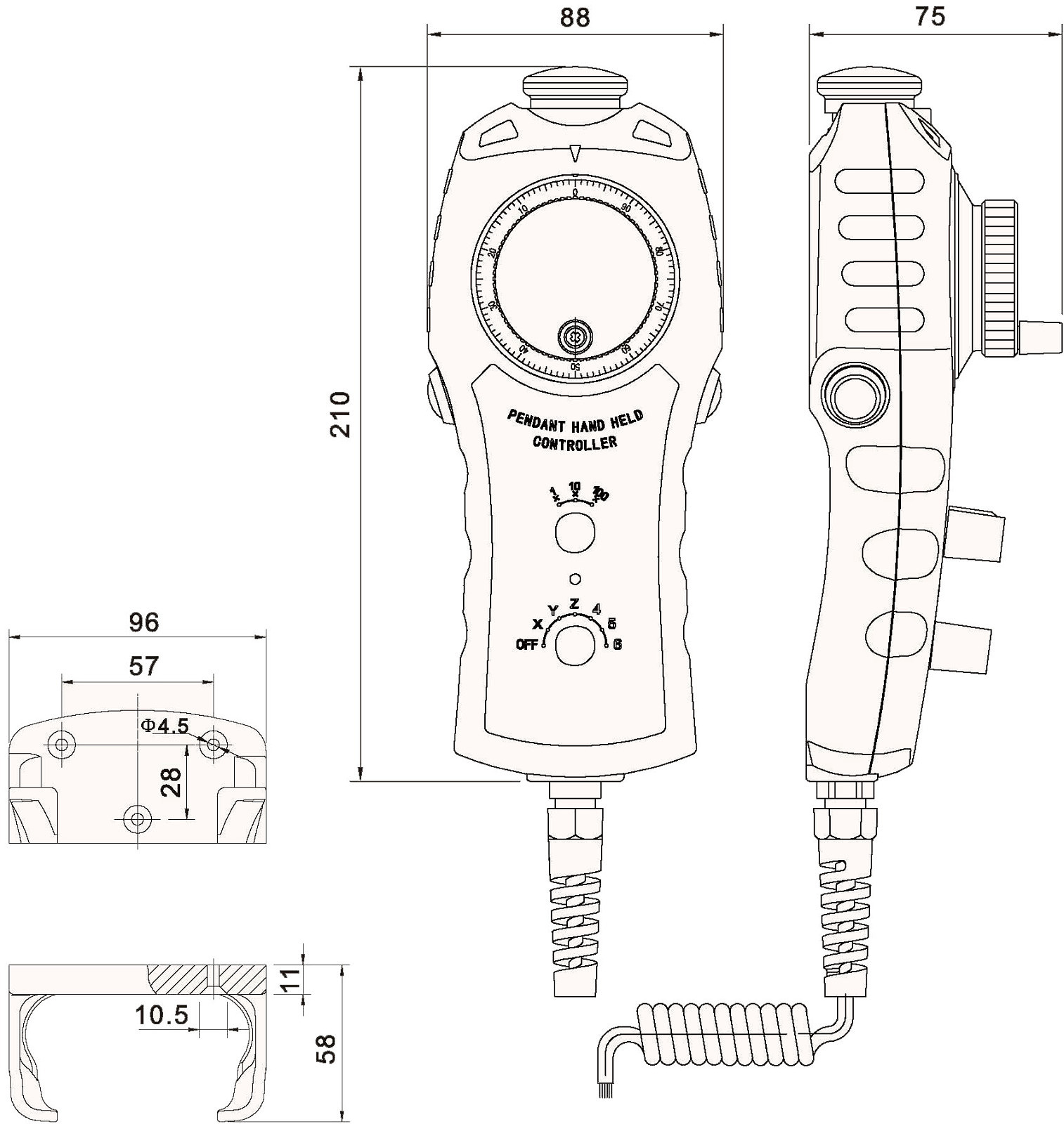
Wymiary ręcznego manipulatora