







")
Opis
CSMIO-MPG Zestaw to 6-osiowe gotowe rozwiązanie umożliwiające ręczną manipulację osiami maszyny. Zestaw ten powstał z połączenia modułu CSMIO-MPG i ręcznego manipulator dobrej jakości. Zestaw ten umożliwia łatwe, swobodne i przede wszystkim intuicyjne poruszanie osiami. Został dobrany z myślą o odbiorcach o profesjonalnym podejściu do użytkowania maszyny. Za niewygórowaną cenę mogą oni wyposażyć swoją obrabiarkę w precyzyjne narzędzie do szybkiej konfiguracji bazy materiałowej (G54, G55 …), magazynu narzędzi (offset długości narzędzia), a także do ręcznej obróbki, czy też szybkich ręcznych przejazdów.
Jak to działa?
Moduł CSMIO-MPG po naciśnięciu przycisku ENABLE na ręcznym manipulatorze, za pośrednictwem kontrolera ruchu CSMIO/IP przełącza opragramowanie sterujące (simCNC, Mach3, Mach4) w tryb MPG. Po przełączeniu programu w tryb MPG, moduł CSMIO-MPG rozpoczyna ciągłe zliczanie impulsów enkodera, a także sprawdza stan przełączników (wyboru osi i wielkości korku) ręcznego manipulatora. Wszystkie te informacje, są przesyłane za pośrednictwem szyny CAN do kontrolera ruchu CSMIO/IP, gdzie są zamieniane na trajektorię ruchu dla wybranej osi. Nad tworzeniem trajektorii ruchu czuwa kilka algorytmów, które mają za zadanie uczynić ruch osi precyzyjnym i płynnym. Dopiero tak przygotowana trajektoria ruchu zostaje wykonana przez serwonapęd lub napęd korkowy. W tym samym momencie, gdy oś się porusza, kontroler ruchu CSMIO/IP przesyła aktualne położenie osi do programu simCNC lub Mach3/Mach4 tak, aby jego DRO pozycji osi przedstawiało rzeczywiste położenie.
Stabilność działania zapewniona jest dzięki
- połączeniu modułu CSMIO-MPG z kontrolerem CSMIO/IP poprzez szynę CAN – gwarantuje to poprawną i szybką transmisję nawet w trudnym środowisku przemysłowym. Wielką zaletą szyny CAN jest odporność na zakłócenia nawet w przypadku znacznych odległości pomiędzy urządzeniami, która jest uzyskiwana dzięki transmisji różnicowej i terminacji szyby CAN (rezystor 120 Ohm na początku i końcu szyny CAN). Kolejną z zalet szyny CAN jest zdolność wykrywania kolizji i utraty danych, uzyskiwana dzięki ścisłemu nadzorowi transmisji.
- połączeniu ręcznego manipulatora z modułem CSMIO-MPG przewodem ekranowanym i wykorzystaniu transmisji różnicowej do przesyłania impulsów enkodera. Transmisji różnicowa w tym przypadku jest szczególnie odporna na zakłócenia. Efekt ten uzyskano dzięki zastosowaniu na wejściu enkoderowym modułu CSMIO-MPG transoptorów, które odpowiednio obciążają linię różnicową (terminacja linii różnicowej).
Prosta instalacja
 Podłączenie zestawu CSMIO-MPG jest wyjątkowo proste i nawet osobom niedoświadczonym powinno zająć nie więcej niż 5 minut. Uruchomienie polega na:
Podłączenie zestawu CSMIO-MPG jest wyjątkowo proste i nawet osobom niedoświadczonym powinno zająć nie więcej niż 5 minut. Uruchomienie polega na:
- Zapięciu modułu na szynie DIN
- Umieszczeniu wtyczki DB25 ręcznego manipulatora w gnieździe modułu CSMIO-MPG.
- Podłączeniu szyny CAN za pomocą dołączanej do zestawu taśmy DB9.
- Podłączeniu zasilania 24V DC.
- Podłączeniu obwodu E-STOP do zacisków E1 i E2 (kolejność podłączenia nieistotna). Zaciski E1 i E2 są wyprowadzeniami przycisku E-STOP ręcznego manipulatora.
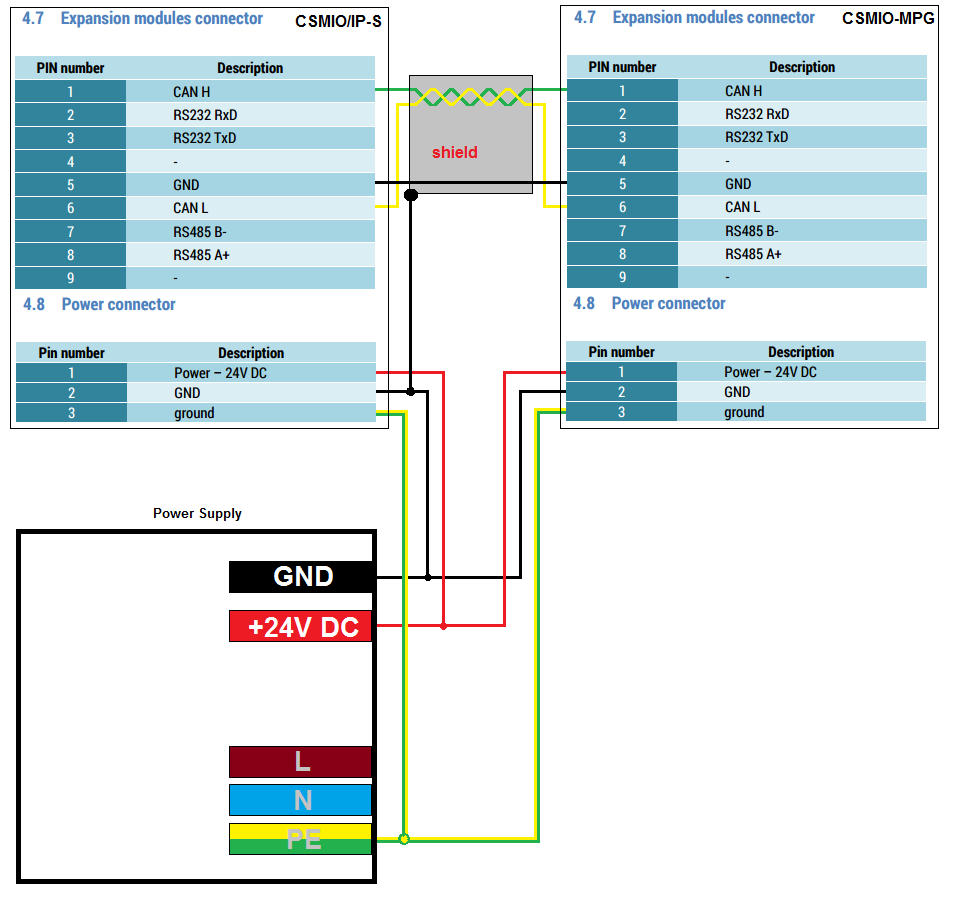
Przykładowe podłączenie szyny CAN dla kontrolera CSMIO/IP-S i modułu CSMIO-MPG (w oparciu o dostępną dokumentację):
MPG – ręczny manipulator CNC
Ręczny manipulator 6-osiowy to narzędzie do szybkiej konfiguracji bazy materiałowej (G54, G55 …) oraz magazynu narzędzi (offset długości narzędzia). Manipulatory CNC także przeznaczone są do konfiguracji ręcznej obróbki, czy też szybkich ręcznych przejazdów (wymaga modułu CSMIO-MPG dostępnego oddzielnie lub w zestawie z manipulatorem).
Podłączenie z CSMIO-MPG jest wyjątkowo proste i nawet osobom niedoświadczonym powinno zająć nie więcej niż 5 minut. Uruchomienie polega na:
- Zapięciu modułu na szynie DIN
- Umieszczeniu wtyczki DB25 ręcznego manipulatora w gnieździe modułu CSMIO-MPG.
- Podłączeniu szyny CAN za pomocą dołączanej do zestawu taśmy DB9
- Podłączeniu zasilania 24V DC.
- Podłączeniu obwodu E-STOP do zacisków E1 i E2 (kolejność podłączenia nieistotna). Zaciski E1 i E2 są wyprowadzeniami przycisku E-STOP ręcznego manipulatora.
Oznaczenia użyte dla tego urządzenia:
| ISMM2188 | – | 001 | 100 | B | – | 5 | L |
| Series | Sequence Number |
Number of Pulses |
Output Signals |
Supply Voltage |
Output Circuit |
Dodatkowy niebieski przycisk to przycisk pozwalający realizować dodatkowe funkcje, w przypadku simCNC między innymi takie jak :
- kasowanie koordynatu wybranej osi w połączeniu z wielopozycyjnym przełącznikiem wyboru osi,
- wyzwalanie bazowania wybranej osi w połączeniu z wielopozycyjnym przełącznikiem wyboru osi,
- zmiana dowolnej wartości (np. SRO, FRO, JRO) w połączeniu z kołem enkodera,
- i wiele innych, jakie tylko zdołamy wymyśleć.
Jak to działa?
Niebieski przycisk został podłączony do niewykorzystanego dotychczas wejścia cyfrowego numer 9 modułu CSMIO-MPG. Jego naciśnięcie aktywuje wejście numer 9, które uruchomia akcję Python, co powoduje wywołanie makra przypisanego do tej akcji. W tym makrze możemy odczytać pozycje przełączników wyboru osi i wielkości kroku, a także pozycję i prędkość enkodera. Na podstawie tych danych możemy stworzyć dodatkowe funkcjonalności.
W przypadku Mach4 sytuacja wygląda analogicznie, lecz tu należy się posłużyć makrem PLC.
Wykorzystanie dodatkowego przycisku w Mach3 jest niemożliwe.
Główne zalety
Jakie są główne zalety Zestawu CSMIO – MPG?
- Brak konfiguracji – Moduł CSMIO-MPG w obecnej wersji plugin dla Mach3 zaraz po instalacji jest gotowy od razu rozpocząć pracę bez potrzeby jakiejkolwiek konfiguracji. W przypadku programów Mach4 oraz simCNC istnieje możliwość własnej konfiguracji sygnałów cyfrowych, a także wykorzystania ich w celach nie związanych z modułem MPG. Oznacza to, że wolne wejścia cyfrowe będzie można wykorzystać w celu np.: podłączenia przycisków start – stop – pauza.
- System bezpieczeństwa – Moduł CSMIO-MPG został wyposażony w sprzętowy obwód E-STOP. Oznacza to, że przez moduł CSMIO-MPG i ręczny manipulator przebiega obwód E-STOP. Po naciśnięciu przycisku awaryjnego zatrzymania na ręcznym manipulatorze zostaje on przerwany (rozwarty), co skutkuje natychmiastowym zatrzymaniem maszyny. Mowa tu o tym samym obwodzie E-Stop, z którego korzysta kontroler ruch CSMIO/IP i o wszystkie przyciski awaryjne zamontowane na maszynie.
- Solidna aluminiowa obudowa modułu CSMIO-MPG dobrze odprowadzająca ciepło oraz doskonale chroniąca obwody elektroniczne urządzenia. Czytelne kontrolki na przednim panelu, ułatwiające prace instalacyjne i ewentualną diagnostykę w przypadku problemów z działaniem przełączników i enkodera ręcznego manipulatora. Ta kompaktowa obudowa montowana jest na szynie DIN, co jeszcze bardziej upraszcza instalację i skraca czas montażu mechanicznego i elektrycznego w szafie sterowniczej.
- Solidne wykonanie ręcznego manipulatora. Manipulator został wyposażony w wytrzymałą i poręczną obudowę na której pokładzie znajdują się dobrej jakości: przełączniki, ręczny enkoder , dioda sygnalizująca pracę pracę w trybie MPG, przycisk ENABLE i E-STOP .
Przy odrobinie dbałości o ręczny manipulator jest on w stanie wytrzymać wiele lat bez najmniejszej awarii mimo częstego użytkowania. - Dodatkowe możliwości – Moduł CSMIO-MPG posiada dwa wejścia analogowe 0-5V, które mogą być wykorzystane do podłączenia potencjometrów korekcji prędkości obrotowej wrzeciona i prędkości posuwu osi.
W przypadku maszyn 4-osiowych 5-ta (oś B) i 6-ta (Oś C) pozycja przełącznika wyboru osi może zostać wykorzystana do korekty prędkości obrotowej wrzeciona i prędkości posuwu osi. Wartość korekty reguluje się w tym przypadku enkoderem ręcznego manipulatora. - Standard przemysłowy – moduł CSMIO-MPG został przystosowany do powszechnie panujących standardów przemysłowych:
- Optoizolwane wyjścia cyfrowe 24V DC (transoptor)
- Optoizolwane wejścia cyfrowe 24V DC
- Zasilanie modułu przystosowane do napięcia 24V DC
Specyfikacja techniczna
Specyfikacja techniczna CSMIO-MPG
| PARAMETR | WARTOŚĆ |
| Liczba obsługiwanych osi | 6 |
| Wejścia cyfrowe (optoizolowane) | 10 |
| Wyjścia cyfrowe (optoizolowane) | 2 |
| Wejścia analogowe | 2 |
| Napięcie zasilania | 24VDC +/-10% |
| Pobór mocy | 5W |
| Maks. napięcie na liniach we/wy | 30VDC |
| Maks. obciążenie lini wyjściowych | 30mA |
| Zakres napięcia wejść analogowych | 0-5 VDC |
| Maks. częstotliwość sygnału enkodera | 10KHz |
| Zakres temperatury otoczenia | 0′C do + 60′C |
| Wilgotność względna (bez zjawiska skraplania) | 10% – 95% |
Specyfikacja techniczna ręcznego manipulatora
| ISMM2188 | – | 001 | 100 | B | – | 5 | L |
| Series | Sequence Number |
Number of Pulses |
Output Signals |
Supply Voltage |
Output Circuit |
Dodatkowy niebieski przycisk to przycisk pozwalający realizować dodatkowe funkcje, w przypadku simCNC między innymi takie jak :
- kasowanie koordynatu wybranej osi w połączeniu z wielopozycyjnym przełącznikiem wyboru osi,
- wyzwalanie bazowania wybranej osi w połączeniu z wielopozycyjnym przełącznikiem wyboru osi,
- zmiana dowolnej wartości (np. SRO, FRO, JRO) w połączeniu z kołem enkodera,
- i wiele innych, jakie tylko zdołamy wymyśleć.
Niebieski przycisk został podłączony do niewykorzystanego dotychczas wejścia cyfrowego numer 9 modułu CSMIO-MPG. Jego naciśnięcie aktywuje wejście numer 9, które uruchomia akcję Python, co powoduje wywołanie makra przypisanego do tej akcji. W tym makrze możemy odczytać pozycje przełączników wyboru osi i wielkości kroku, a także pozycję i prędkość enkodera. Na podstawie tych danych możemy stworzyć dodatkowe funkcjonalności.
W przypadku Mach4 sytuacja wygląda analogicznie, lecz tu należy się posłużyć makrem PLC.
Wykorzystanie dodatkowego przycisku w Mach3 jest niemożliwe.
| ELECTRICAL SPECIFICATION | |
| Output wave | Square wave |
| Output signals | A,B, (Line driver output A,A(_),B,B(_), phase) |
| Current consumption | ≤100mA |
| Response Frequency | 0~20KHz |
| Output phase difference | 90° ± 45° |
| Supply voltage | 5VDC and 24 VDC |
| Signal level | VH ≥ 85%Vcc, VL ≤ 0.3V |
| Number of pulses | 100 |
| MECHANICAL SPECIFICATION | |
| Signal position | 2kind |
| Speed without sealing | 500 rmp |
| Starting torque w/o sealing | ≤2.0x 10-2 ~6.0x 10-2 Nm (+25°C) |
| Shock resistance | 980m/s2, 6ms, 2 times each on XYZ |
| Waga | Appr. 740g (incl. 1.5 meter cable) |
Szczegóły manipulatora w instrukcji – zakładka Download
![]()
Przeznaczenie
Moduł CSMIO-MPG Zestaw jest polecany użytkownikom / firmom, które:
- modernizują oryginalne maszyny CNC i chcą przywrócić im pełną funkcjonalność poprzez użycie ręcznego manipulatora,
- budują nowe maszyny i chcą podnieść ich walory użytkowe poprzez zastosowanie rozwiązań dotychczas spotykanych w obrabiarkach dobrze znanych producentów maszyn CNC,
- budują maszyny o dużym polu roboczym i szukają rozwiania, które pozwoliłoby operatorowi maszyny oddalić się od pulpitu sterującego zachowując kontrolę nada osiami maszyny (w trybie MPG/JOG), prędkością posuwu osi, prędkością obrotową wrzeciona a także przyciskiem awaryjnego zatrzymania.
Moduł CSMIO-MPG Zestaw może być z powodzeniem stosowany w maszynach CNC każdego typu, szczególnie jest polecany dla frezarek i tokarek.
Zawartość zestawu
- Moduł CSMIO-MPG
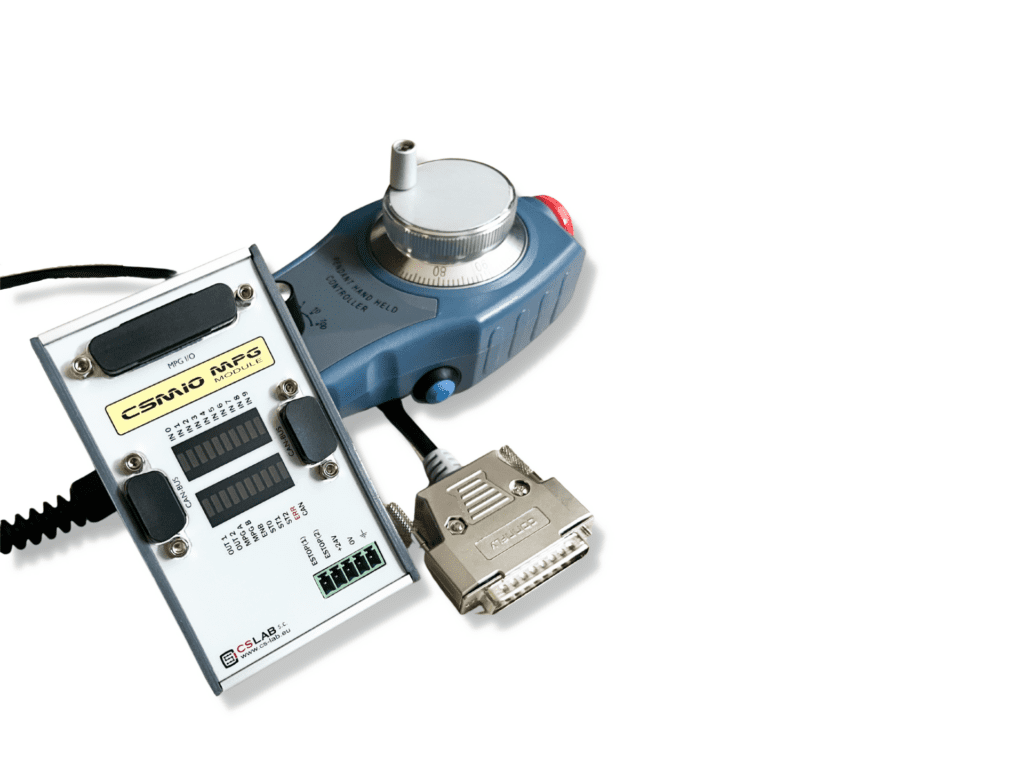
- 1x taśma przyłączeniowa DB9
- Ręczny manipulator model 2188
- terminator
![]()
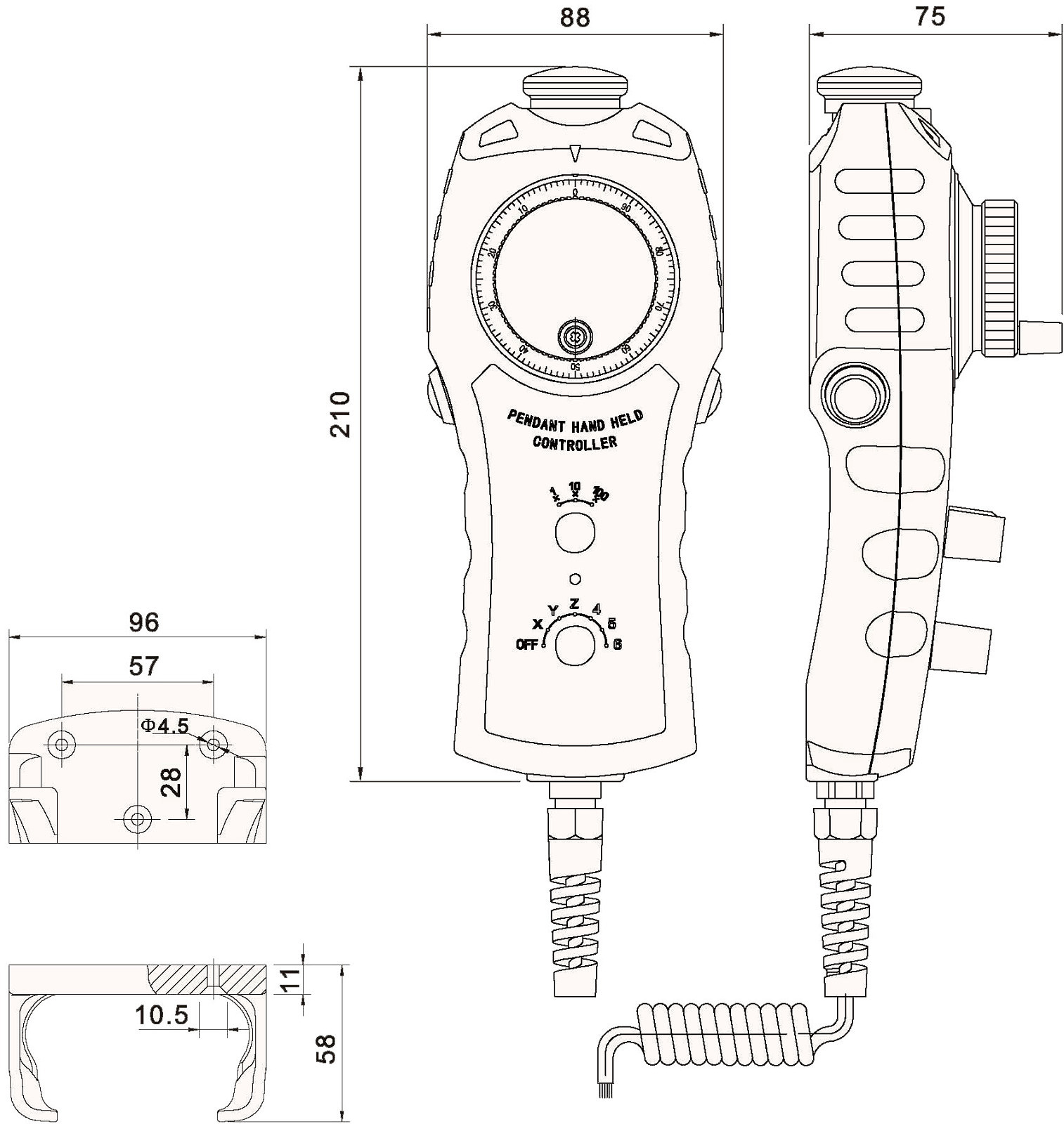
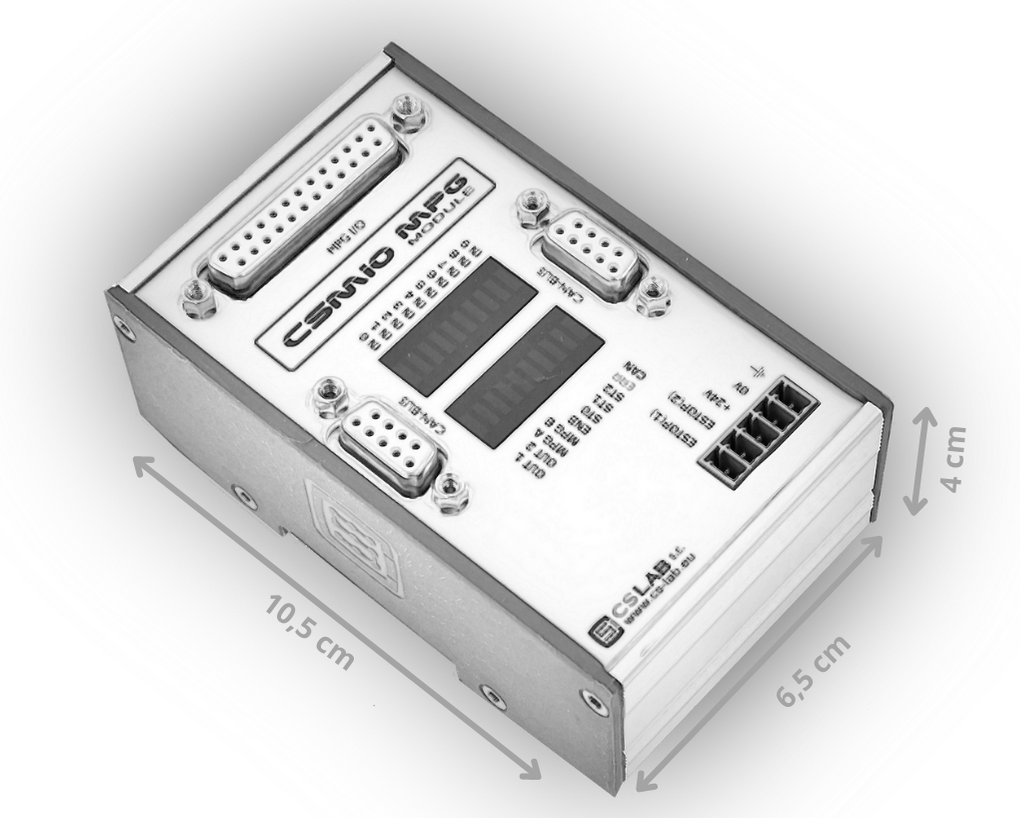
Wymiary Zestawu CSMIO-MPG
Manipulator MPG – wymiary (mm)
Moduł CSMIO-MPG – wymiary (cm)
Download
Moduł CSMIO-MPG®
CSMIO-MPG® Dokumentacja
Manipulator MPG 6-osiowy ISMM2188 do obsługi funkcji JOG
Manipulator MPG ISMM2188




